
全國咨詢熱線:
全國咨詢熱線:
熱門關(guān)鍵詞:交直流耐壓關(guān)鍵詞一關(guān)鍵詞二關(guān)鍵詞三
產(chǎn)品中心
PRODUCT CENTER推薦產(chǎn)品
RECOMMOND聯(lián)系我們
CONTACT US聯(lián)系人:陳經(jīng)理
手 機(jī):13636639908
電 話:021-51698868
地 址:上海市寶山區(qū)蘊(yùn)川路5475號
高壓開關(guān)是電力系統(tǒng)中最重要的控制和保護(hù)設(shè)備。JJG1120-2015《高壓開關(guān)動(dòng)作特性測試儀檢定規(guī)程》規(guī)定需要定期對高壓開關(guān)的分/合閘時(shí)間、分/合閘速度、分/合閘同期性、平均速度等動(dòng)特性進(jìn)行試驗(yàn)。市場上圍繞上述要求出現(xiàn)了多種型號的高壓開關(guān)動(dòng)特性測試儀,隨著管理的制度化、正規(guī)化發(fā)展,對此類測試儀性能的校準(zhǔn)提出了相應(yīng)的要求。
開關(guān)特性測試儀校準(zhǔn)裝置,采用模擬被測開關(guān)觸頭產(chǎn)生預(yù)定的動(dòng)作(合閘、分閘和彈跳),同時(shí)對相應(yīng)的時(shí)間進(jìn)行準(zhǔn)確地測量,給出動(dòng)作時(shí)間供校準(zhǔn)用。原理框圖如圖1所示。

圖1 系統(tǒng)原理框圖
合閘時(shí)間:從接到合(閘)指令瞬間起到所有極觸頭都接觸瞬間的時(shí)間間隔。
為了更直觀的對合閘測試進(jìn)行理解,根據(jù)合閘時(shí)間的定義,下面將合閘測試以邏輯時(shí)序圖的形式表示合閘測試的過程:

分閘時(shí)間:從開關(guān)分閘操作起始瞬間(即接到分閘指令瞬間)起到所有極的觸頭分離瞬間的時(shí)間間隔。
為了更直觀的對分閘測試進(jìn)行理解,根據(jù)合閘時(shí)間的定義,下面將分閘測試以邏輯時(shí)序圖的形式表示分閘測試的過程:

彈跳時(shí)間:開關(guān)動(dòng)觸頭與靜觸頭在分(合)閘操作中,從第一次分開(合上)開始到最后穩(wěn)定地分開(合上)為止的時(shí)間。
為了更直觀的對彈跳測試進(jìn)行理解,根據(jù)彈跳時(shí)間的定義,下面將彈跳測試以邏輯時(shí)序圖的形式表示彈跳測試的過程:

可以同時(shí)對一路開關(guān)觸頭進(jìn)行模擬合、分閘及彈跳動(dòng)作;
可以任意設(shè)置的運(yùn)動(dòng)位移和速度,從而校準(zhǔn)開關(guān)特性測試儀的速度;
位移設(shè)置范圍寬:10mm~240mm;
大屏幕液晶菜單顯示,操作簡單、方便;
參數(shù) | 位移 | 平均速度 |
校驗(yàn)范圍 | 10mm~240mm | 0.1 m/s -2m/s |
準(zhǔn)確度 | ±0.2%設(shè)定值±0.1m | ±0.3%設(shè)定值±0.005m/s |
位移:10mm~240mm
平均速度:(0.1~2)m/s
位移參數(shù):±0.2%設(shè)定值±0.1mm;
速度參數(shù):±0.3%設(shè)定值±0.005m/s。

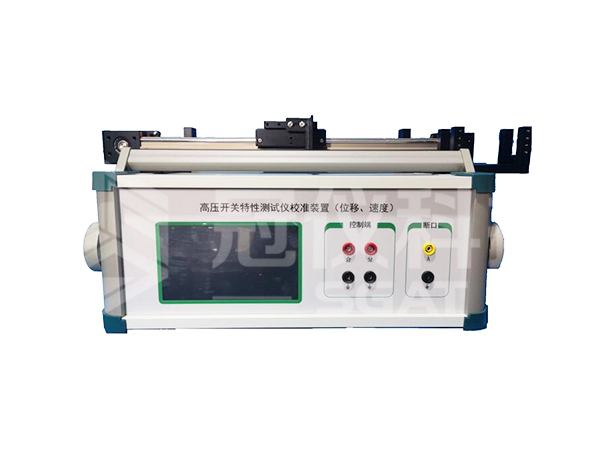
斷口接口:本裝置最多支持路斷口進(jìn)行模擬,如圖所示,每路斷口下方的黑色接口為每路斷口對應(yīng)的接口。
控制端接口:該斷口主要是接受合閘信號和分閘信號,輸入的合閘信號和分閘信號為高電平220V的脈沖信號。

CH1、CH2:該接口分別對應(yīng)安裝在速度平臺上的兩個(gè)固定位置傳感器的光電信號,主要用于校準(zhǔn)整個(gè)裝置的速度參數(shù),當(dāng)處于校準(zhǔn)狀態(tài)時(shí),該兩個(gè)接口會分別輸出兩個(gè)脈沖信號;
光柵接口:該接口用于連接速度平臺的光柵尺;
伺服接口:該接口用于連接控制器的CN1接口;
限位接口:該接口用于連接速度平臺的限位開關(guān);
CN2(編碼器接口):該接口用于連接電機(jī)的編碼器接口;
CN1(控制接口):該接口用于連接伺服接口;
UVW接口:該接口用于連接電機(jī)的動(dòng)力驅(qū)動(dòng)接口;
B1B2L1L2接口:該接口L1和L2配合接地端連接到220VAC;
接地端:該接口是整個(gè)控制器的接地端;

裝置的所有接口都具有防插錯(cuò)功能,因此按照如下圖所示,將主機(jī)與速度平臺的所有接口都進(jìn)行連接。

5.2.1合閘平均速度:
1) 斷口連接
將校準(zhǔn)裝置相應(yīng)的斷口信號連接至被校準(zhǔn)儀器。注意A、B、C三相及其對應(yīng)地的連接,如下圖所示。

2) 合閘信號連接
將校準(zhǔn)裝置相應(yīng)的合閘信號連接至被校準(zhǔn)設(shè)備。注意合閘信號的正負(fù)方向。

3) 安裝位移傳感器
如圖安裝位移傳感器。

注意:
將滑臺手動(dòng)推到傳感器夾具一端;
位移傳感器安裝應(yīng)該貼近夾具的底部,保證與電機(jī)軌道水平安裝。
1) 選擇合閘
將主機(jī)與控制器的兩根電源線都接220VAC。

——選擇合閘試驗(yàn)——
——設(shè)置距離——:根據(jù)被校準(zhǔn)設(shè)備設(shè)置傳感器的運(yùn)動(dòng)距離;
——設(shè)置速度——:根據(jù)被檢點(diǎn)選擇速度值;
——開始測試——:此時(shí)運(yùn)動(dòng)平臺將運(yùn)動(dòng)到傳感器夾具的遠(yuǎn)端;直至界面提示“等待合閘信號”;
此時(shí)操作被校設(shè)備發(fā)出合閘控制信號,速度平臺將模擬相應(yīng)的速度帶著傳感器運(yùn)動(dòng)。
運(yùn)動(dòng)完畢后,界面將顯示合閘試驗(yàn)的實(shí)際運(yùn)動(dòng)距離和速度(注意被校準(zhǔn)設(shè)備平均速度定義與標(biāo)準(zhǔn)器要一致,可以通過設(shè)置界面進(jìn)行設(shè)置)。
換向:可以用于切換速度平臺運(yùn)動(dòng)的方向,一般設(shè)置采用默認(rèn)的從右往做的運(yùn)動(dòng)方向。

5.2.2分閘平均速度:
1) 斷口連接
將校準(zhǔn)裝置相應(yīng)的斷口信號連接至被校準(zhǔn)儀器。注意A、B、C三相及其對應(yīng)地的連接,如下圖所示。

2) 分閘信號連接
將校準(zhǔn)裝置相應(yīng)的合閘信號連接至被校準(zhǔn)設(shè)備。注意合閘信號的正負(fù)方向。

3) 安裝位移傳感器
如圖安裝位移傳感器。

注意:
將滑臺手動(dòng)推到傳感器夾具一端;
位移傳感器安裝應(yīng)該貼近夾具的底部,保證與電機(jī)軌道水平安裝。
4) 選擇分閘
將主機(jī)與控制器的兩根電源線都接220VAC。

——選擇分閘試驗(yàn)——
——設(shè)置距離——:根據(jù)被校準(zhǔn)設(shè)備設(shè)置傳感器的運(yùn)動(dòng)距離;
——設(shè)置速度——:根據(jù)被檢點(diǎn)選擇速度值;
——開始測試——:此時(shí)運(yùn)動(dòng)平臺將運(yùn)動(dòng)到原點(diǎn);直至界面提示“等待分閘信號”;
此時(shí)操作被校設(shè)備發(fā)出分閘控制信號,速度平臺將模擬相應(yīng)的速度帶著傳感器運(yùn)動(dòng)。
運(yùn)動(dòng)完畢后,界面將顯示分閘試驗(yàn)的實(shí)際運(yùn)動(dòng)距離和速度(注意被校準(zhǔn)設(shè)備平均速度定義與標(biāo)準(zhǔn)器要一致,可以通過設(shè)置界面進(jìn)行設(shè)置)。
換向:可以用于切換速度平臺運(yùn)動(dòng)的方向,一般設(shè)置采用默認(rèn)的從右往做的運(yùn)動(dòng)方向。

5.2.3設(shè)置


參數(shù)設(shè)置主要用于速度參數(shù)的定義,系統(tǒng)默認(rèn)是的平均速度是分合全程的10%-90%,用戶可以根據(jù)被校準(zhǔn)儀器的速度定義來設(shè)置。
5.2.3.2——位移校準(zhǔn)——
該界面主要用于裝置本身位移參數(shù)的校準(zhǔn)。當(dāng)處于位移校準(zhǔn)界面時(shí),可以手動(dòng)推動(dòng)速度平臺的滑塊運(yùn)動(dòng)。
5.2.3.3——速度校準(zhǔn)——
該界面主要用于裝置本身速度參數(shù)的校準(zhǔn),在速度平臺上在相距100mm的地方安裝了兩個(gè)光電傳感器。兩個(gè)光電傳感器的輸出信號分別對應(yīng)后面的Q9接口CH1和CH2,通過測量兩個(gè)輸出信號的時(shí)間間隔來校準(zhǔn)速度。
Copyright ? 2008-2022 版權(quán)所有:上海冠儀自動(dòng)化科技有限公司 備案號:滬ICP備2023012211號-12
技術(shù)支持:華夕網(wǎng)絡(luò) 統(tǒng)計(jì)代碼放置
服務(wù)熱線




管理員
該內(nèi)容暫無評論